| Hi all-- resident blogger #3 reporting for duty! Hope you all have been enjoying watching us try to make our HExBOT and watch the little cutie take its first steps. Maybe you even want to fund us...(acrylic instead of wood would be so great--alas we have run out of money. And can our servos even handle the weight?) Today we started a major overhaul of the code. We changed the math for the leg trajectory so that the changes in the coordinate system are smoother and make more sense. In this iteration we have 3 coordinate systems (or 2 coordinate transforms taking place). We have an i, j, k overall coordinate system whose origin is the center of the HExBOT body, an x, y, z coordinate system whose origin is the center of the servo horn and whose y is parallel to the "vertical" side of the hexagon, and an x2, y2, z2 coordinate system which is the previous coordinate system rotated by an angle theta. This should make it easier to give each leg the same direction and have different, correct results happen. This way we can give each leg the same points for 24 different time steps and have it walk. More to come about the subtleties in another post! | 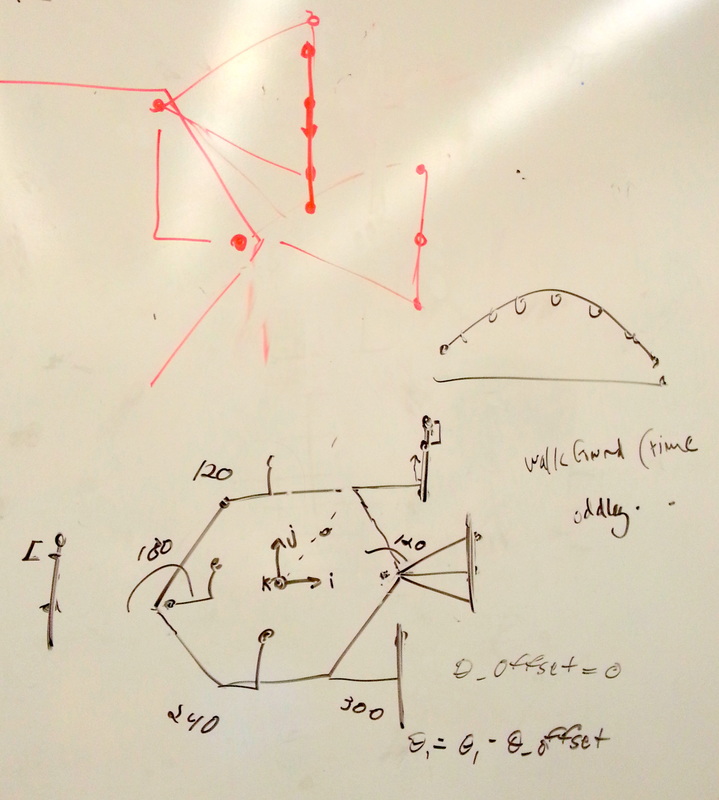 |
|
Comments are closed.
|
Archives
December 2015
Categories
|
