Jayce and Rebecca laser-cut the parts of the first leg out of MDF, and we all assembled it, using servos available in the PoE lab.
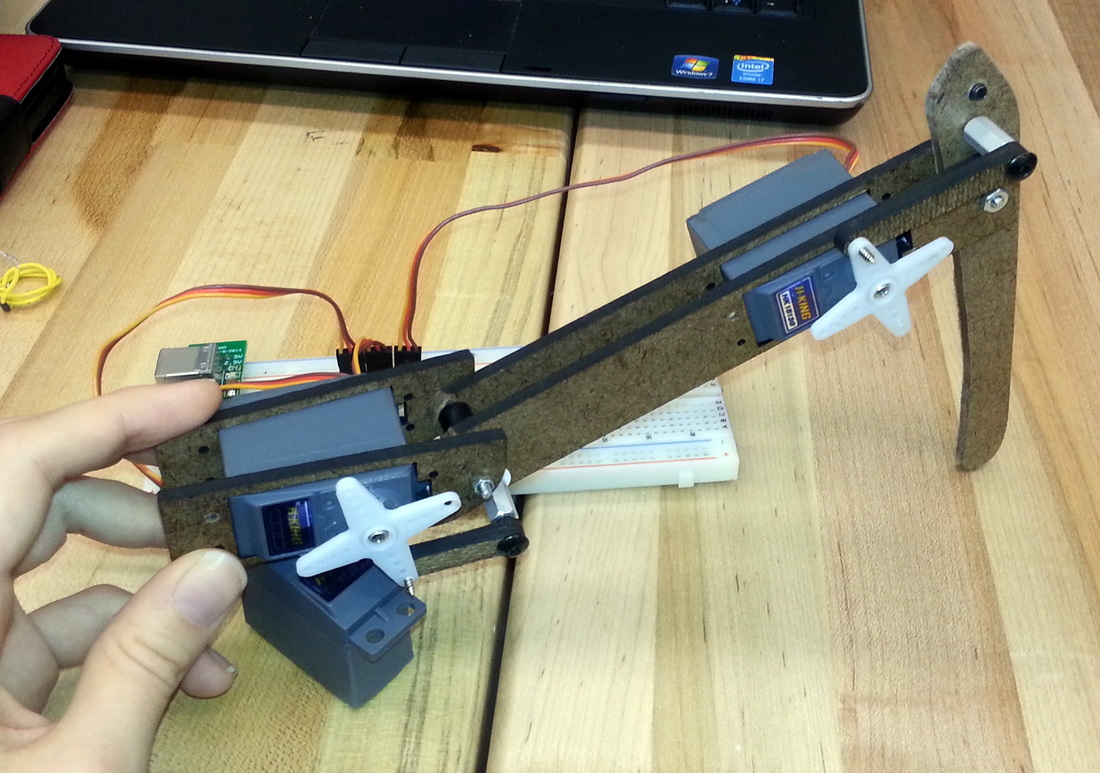
We've also begun work on the code to move the leg. We control the leg by telling each of the three servos to move to a given angle. We'll be able to control the speed as well, but we're not worried about this at this moment.
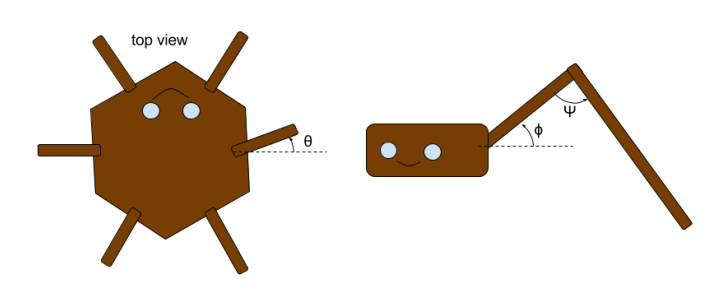
At first glance, moving θ would work to make our robot walk, but each the contact point of each leg would be moving in an arc. To avoid foot slippage, the end of each leg needs to move directly backward relative to the body, which means the other angles will need to get involved. This requires a surprising amount of math.
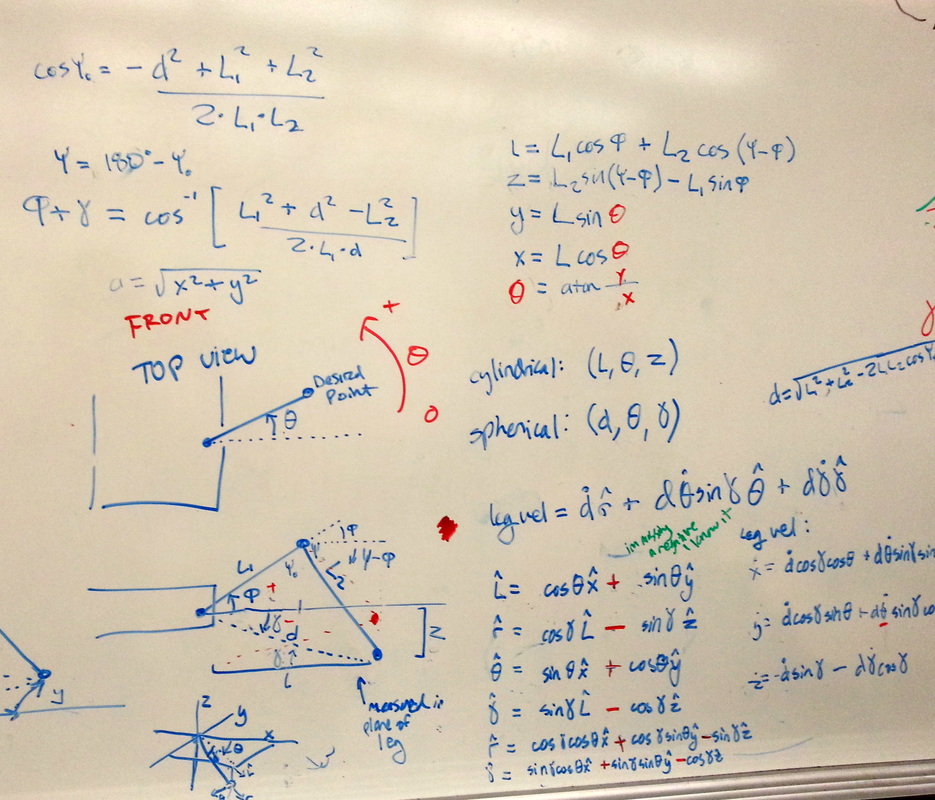
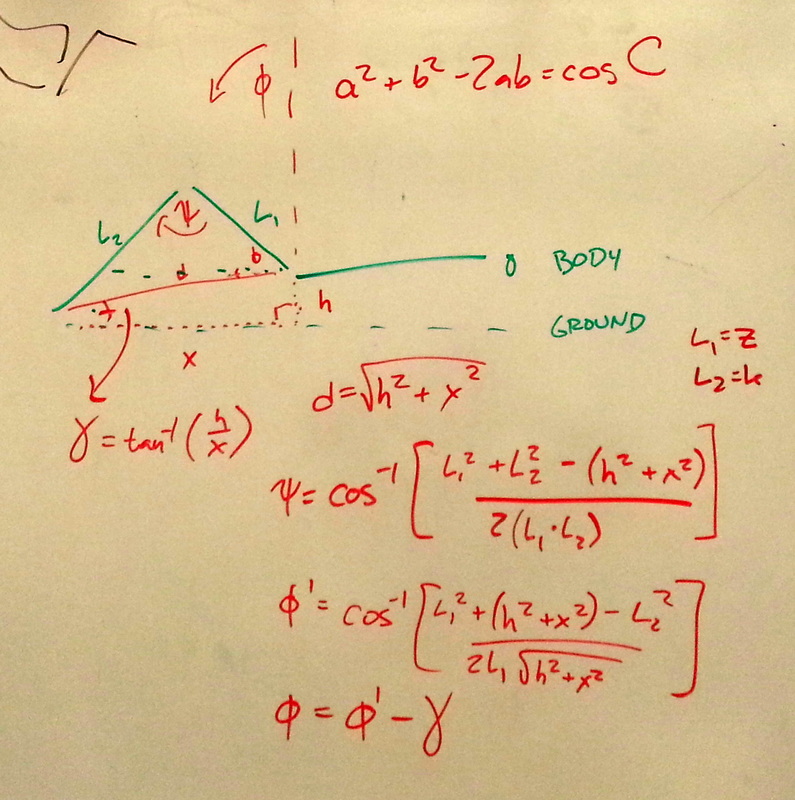
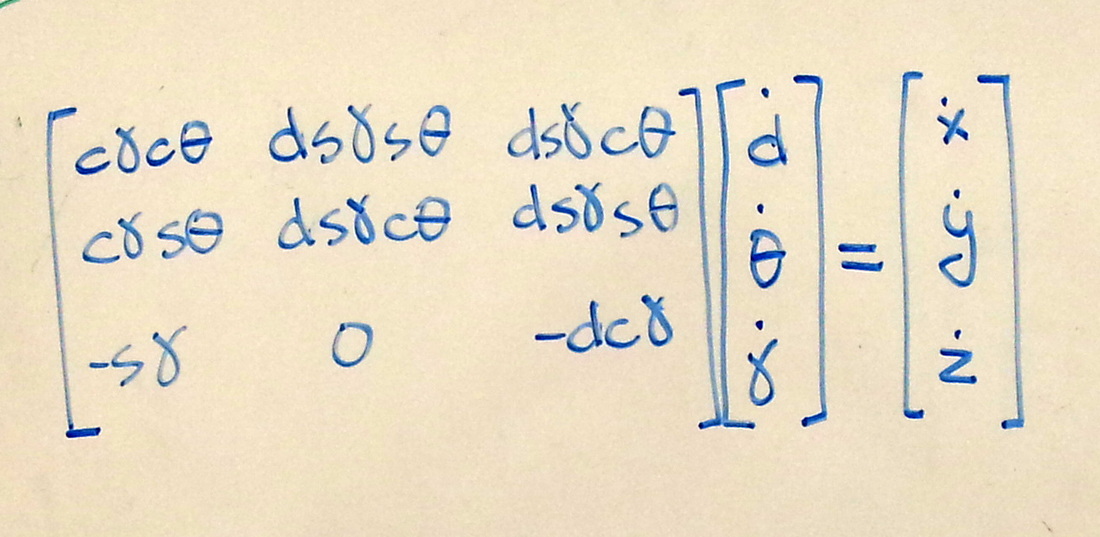
All that culminated in a series of equations that translate between the angles θ,Ψ, and φ and the x-y-z position of the end of the leg relative to the body, as well as the following matrix that converts between spherical and cartesian rates of motion for the leg. We can find the rates of change of θ,Ψ, and φ based on the rates of change of d, θ, and γ.
Translating this into Arduino code is going to be tough. None of us have done much math in Arduino/C++, but we found this library for dealing with matrices in Arduino: http://playground.arduino.cc/Code/MatrixMath
Wish us luck!
Wish us luck!
