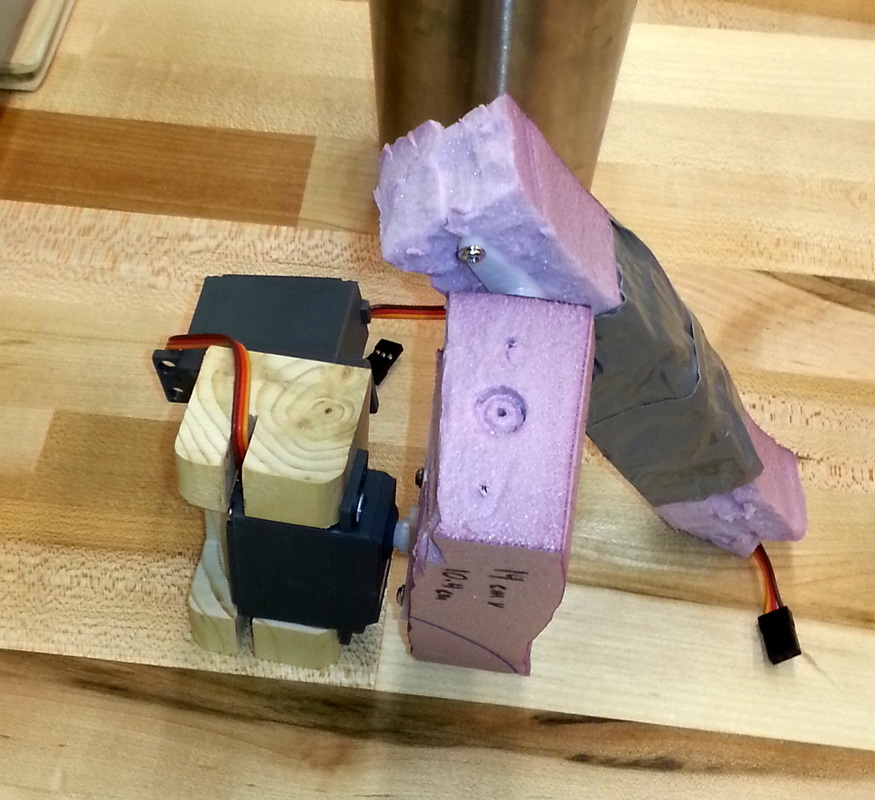
Our first sprint is underway, and we're aiming to have a working, wiggling leg by this Friday. We spent the weekend making sketches and prototypes of leg linkages.
Though there are lots of single-motor leg linkages, we agreed to give each leg three degrees of freedom to allow our hexbot to intelligently climb over obstacles.
Though there are lots of single-motor leg linkages, we agreed to give each leg three degrees of freedom to allow our hexbot to intelligently climb over obstacles.
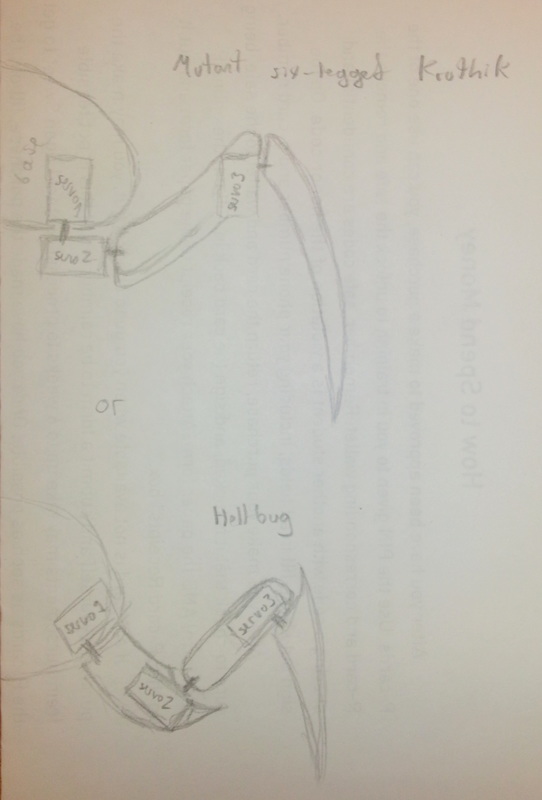
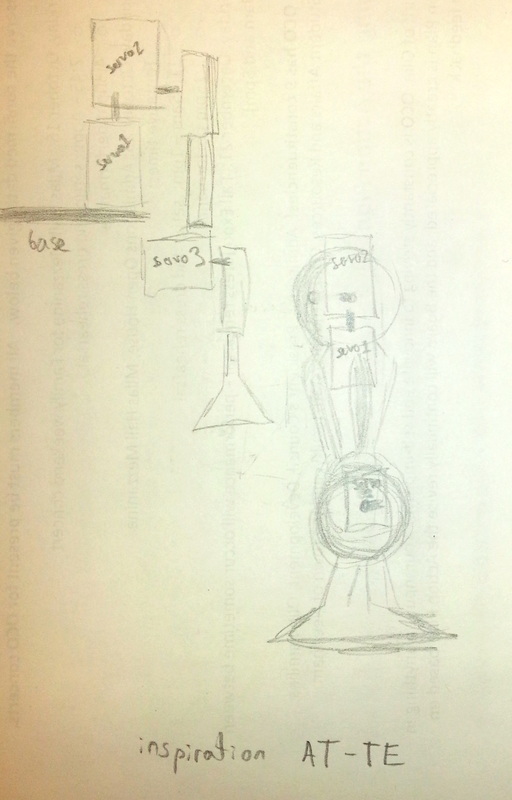
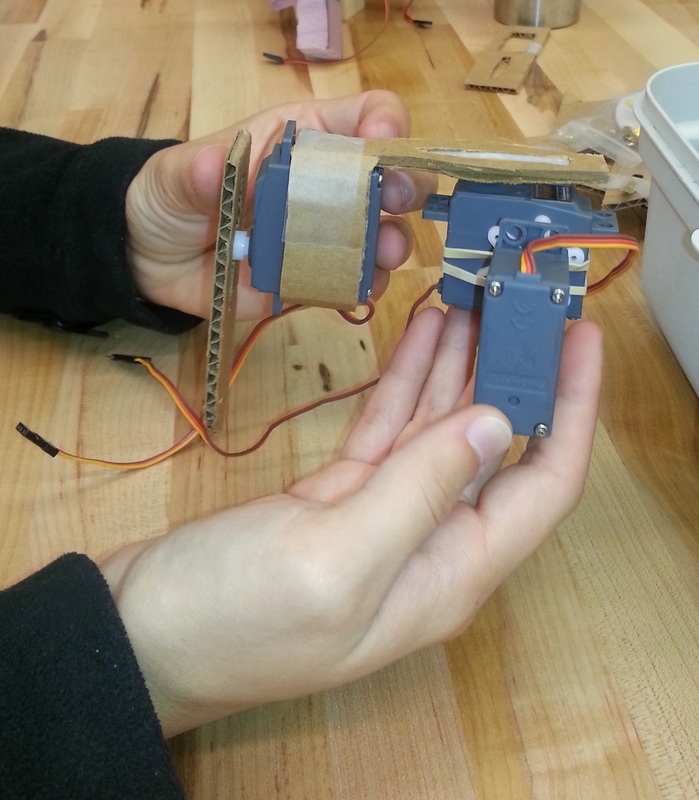
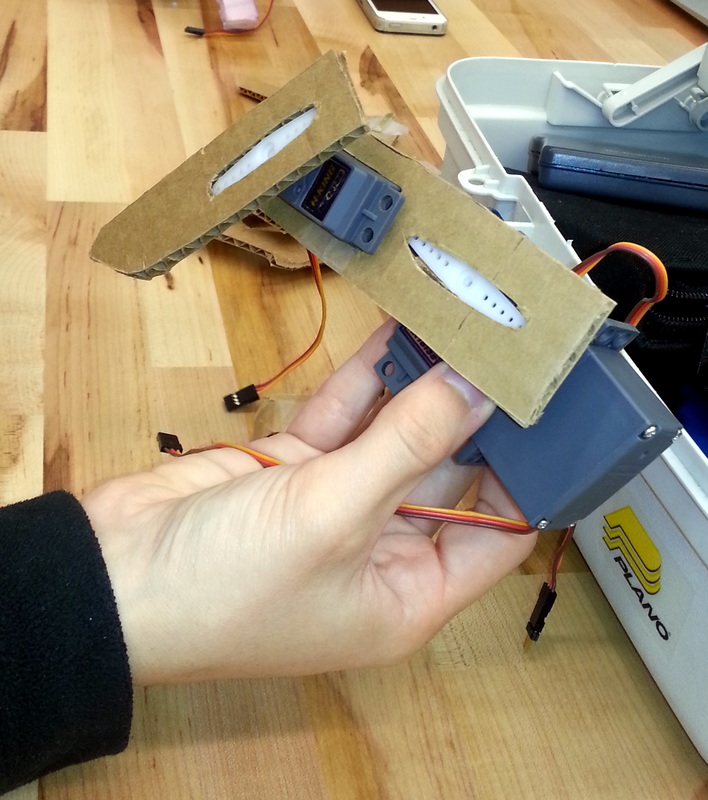
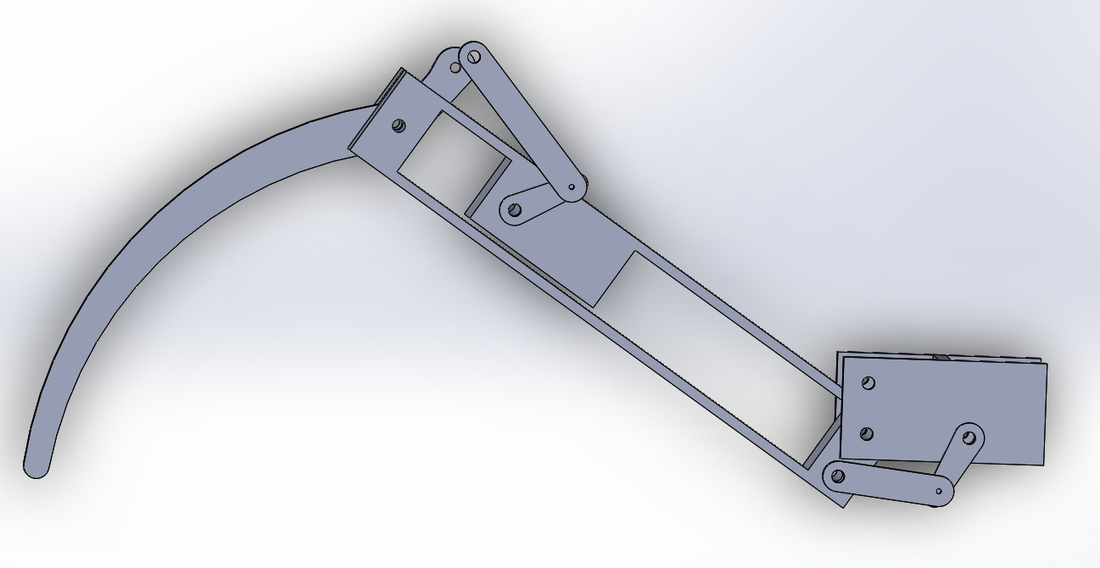
As it turns out, there are a lot of ways to connect three servos and three sticks. In deciding between them, we considered the amount of energy the servos would be using while the robot stood still, as well as the ability of the leg to move to the positions required for walking. Most of the designs were similarly spiderlike, only changing the order of the rotations. We chose Rocco's, because it followed pattern of other robots' leg linkages, as well as being already CADed.
